埃隆·馬斯克透過特斯拉公司(Tesla, Inc.),正引領交通運輸的未來,致力於實現完全自動駕駛車輛的願景。特斯拉的無人駕駛汽車生態系統包含完全自動駕駛(FSD)Beta軟體套件,以及備受期待的專屬機器人計程車——Cybercab。這些創新旨在無需人工干預即可運行,依靠先進的AI視覺系統來解讀周遭環境。儘管這項技術具有突破性意義,目前仍以第2級部分自動化的先進駕駛輔助系統(ADAS)運作,未來目標是過渡至無需監督的完全自動駕駛能力。
在本文中,我們將探討特斯拉無人駕駛技術的運作方式、所面臨的安全與資安挑戰、從駕駛輔助到完全自動駕駛的演進過程,並回答關於此計畫的常見問題。
特斯拉無人駕駛技術的運作方式
特斯拉的自動駕駛方法建立於尖端AI與視覺系統之上。以下是這項技術運作方式的逐步解析:
- 視覺感知處理 - 特斯拉車輛配備八攝影機神經網路架構,提供360度環境資料。與許多競爭對手不同,特斯拉已捨棄對LiDAR和雷達的依賴,改採純電腦視覺方式來解讀周遭環境。
- 車隊學習與神經網路訓練 - 特斯拉利用數百萬輛在路上行駛車輛所蒐集的資料,訓練其自動駕駛演算法,透過真實世界情境不斷優化決策能力。該公司使用Dojo超級電腦處理大量資料,尤其針對對自動駕駛系統構成挑戰的邊緣案例情境。
- 實際部署與驗證 - 特斯拉在消費者車輛中進行「影子模式」測試,讓系統在人類駕駛員保持控制的同時模擬自動駕駛。透過無線軟體更新持續擴展系統功能,確保其根據新資料與回饋不斷演進。
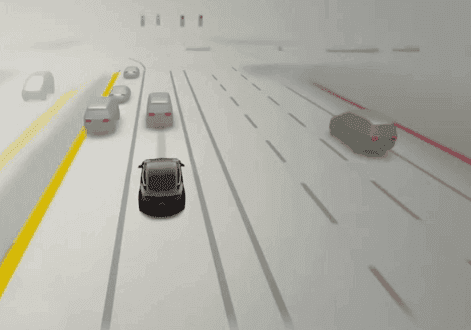
8 個攝影機提供360度覆蓋
攝影機陣列
純視覺 - 不使用LiDAR或雷達
感測器策略
用於邊緣案例處理的Dojo超級電腦
訓練基礎設施
第2級(有監督的ADAS)
目前自動化等級
無線(OTA)軟體更新
更新方式
安全風險與資安挑戰
儘管特斯拉的無人駕駛技術蘊含巨大潛力,但在大規模部署之前,也伴隨著必須解決的重大風險與挑戰。
從駕駛輔助到完全無人駕駛
特斯拉邁向完全自動駕駛車輛的旅程是一個分階段的過程,目前能力與未來目標之間有著明確的區別。
目前的限制
目前,特斯拉的FSD在有監督的條件下運作,意味著人類駕駛員必須隨時保持警覺並準備好接管控制。這使得Autopilot(一項駕駛輔助功能)有別於完全自動駕駛(一個尚未完全實現的目標)。
機器人計程車路線規劃

特斯拉正致力於開發Cybercab——一款專為機器人計程車設計、不配備方向盤或踏板的車輛,預示著一個無需人工干預的未來。這項轉型旨在重新定義城市移動方式,打造可用於叫車服務的共享自動駕駛車隊,實現更低的每英里成本及全天候的移動即服務(MaaS)。
監管時程
實現無監督自動駕駛操作需要取得類似醫療設備FDA流程的監管批准。這涉及嚴格的測試與驗證,以確保在各種環境和情境下的安全性。備受矚目的事故與公眾信任問題,進一步使獲得批准的道路更加複雜。
特斯拉自動駕駛路線圖
| 階段 | 狀態 | 主要功能 |
|---|---|---|
| Autopilot | 已上線(第2級ADAS) | 車道保持、自適應巡航控制 |
| FSD Beta | 有監督(第2級) | 城市街道、紅綠燈、轉彎 |
| 無監督FSD | 開發中 | 無需人工干預 |
| Cybercab(機器人計程車) | 規劃中 - 無方向盤 | 專用、無人駕駛、車隊運營 |
常見問題
特斯拉的FSD現在真的是無人駕駛嗎?+
不是。特斯拉的完全自動駕駛(FSD)系統目前仍需要人工監督。雖然它能自主處理許多駕駛任務,但仍屬於第2級自動化,意味著駕駛員必須隨時保持專注並準備好隨時介入。
特斯拉的方式與Waymo或Cruise有何不同?+
特斯拉完全依賴使用攝影機和神經網路的視覺系統,而Waymo和Cruise等競爭對手通常會整合LiDAR和雷達以增強環境映射能力。特斯拉的方式也得益於從數百萬輛消費者車輛收集的大量車隊學習資料。
Cybercab的發布時程為何?+
特斯拉尚未公布Cybercab的官方發布日期。埃隆·馬斯克表示,這是公司打造完全自動駕駛機器人計程車車隊長期願景的一部分。時程更新預計將在特斯拉活動和財報電話會議中公布,但監管障礙可能會對時程產生重大影響。
特斯拉自動駕駛計畫面臨的最大風險是什麼?+
主要挑戰包括:網路安全漏洞(例如自動駕駛車隊遭受潛在駭客攻擊)、複雜城市環境中的系統性技術故障模式、事故發生時的法律與倫理責任歸屬,以及在備受矚目的事故發生後建立足夠的公眾信任。